KeiganPi チュートリアル Node-RED
Node-REDを利用してKeiganMotorを操作します。
速度を指定して回転、停止、距離を指定して往復運動を行うフローを作成します。
Node-REDエディターへの接続
ブラウザでNode-REDエディターにアクセスし、ログイン情報を入力します
・KeiganPi から直接接続する場合 デスクトップの「Node-RED」アイコンを実行
・外部から接続する場合 ブラウザでhttp://keiganpi.local:1880/にアクセス
その他、接続方法についての詳細は「Node-REDへの接続」を参照下さい。
ノードの確認
ログイン後、管理画面左側のノード一覧「Keigan Motor」カテゴリ内に2つのノードがあるのを確認します。
- USB Selector
- USB接続したKeiganMotorを検出し接続するノード。接続したモーターを出力する。
- Sequencer
- モーターを操作するコマンドが設定でき、入力から送られてきたモーターに対して設定したコマンド操作を行う。「USB Selector」の後方に繋いで使用する。
KeiganMotor の準備
KeiganMotorの給電ポート(USB Type-C)をバッテリーに、通信用ポート(USB MicroB)をKeiganPi に接続します。

※KeiganMotor の給電用ポート(TypeC)を RaspberryPi に接続はしないでください。電力不足でRaspberry Pi が誤動作する可能性があります。
※モバイルバッテリーの場合、過充電防止の為モーターの負荷が高くなると、給電を停止する物があります。
車輪等の負荷の高いに使う場合は、3A出力の物やUSB充電器等の使用をお勧めします。
KeiganMotor を回転させる
回転フローの作成
フローに「inject」「USB Selector」「Sequencer」ノードを以下のように配置し、Sequencerノードの設定パネルで以下のようにします。

- injectノード
- TRUE又は任意のタイムスタンプ。
- USB Selectorノード
- 「USB Selector」の設定パネルで「再スキャン」を実行し、検出されたモーターを選択します。
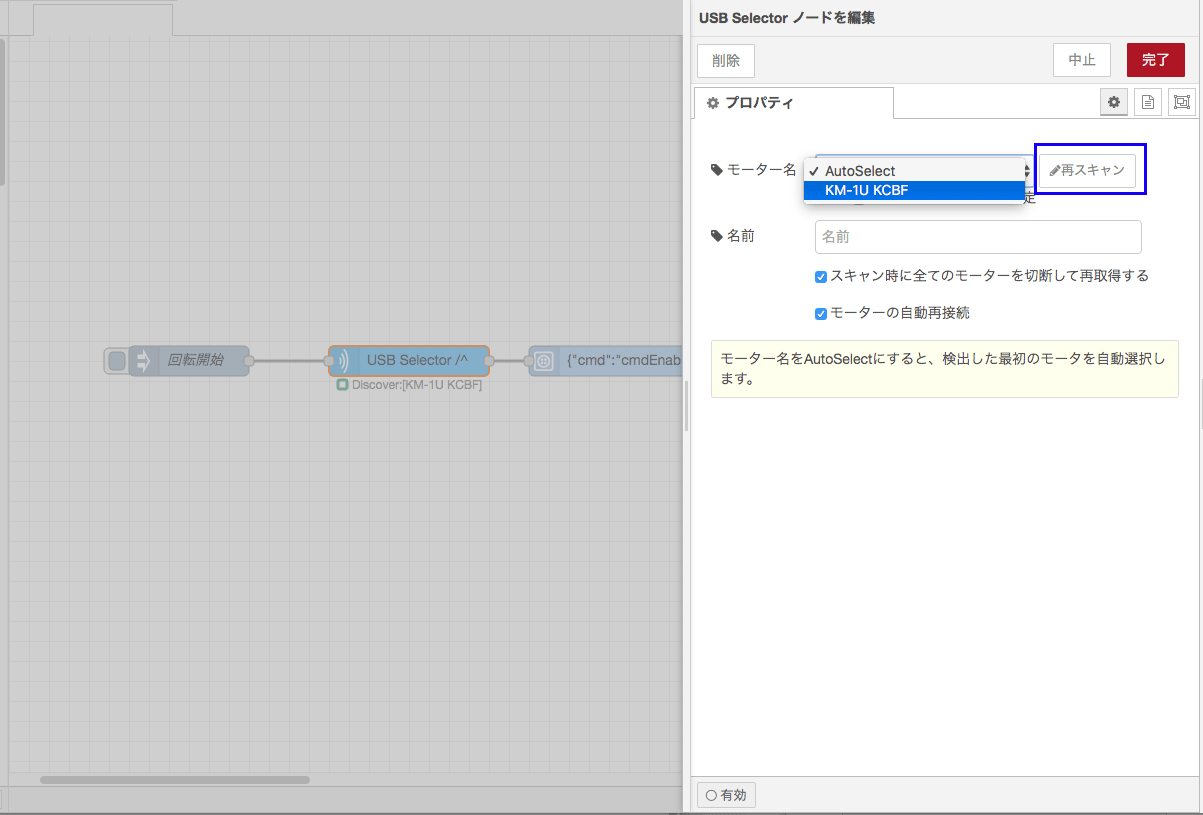
※既にモーターが認識されている場合は「USB Selector」に検出したモーター名が表示されます。
一度認識すれば、Node-REDが再起動するまで有効です。
- Sequencerノード
- Sequencerのモーターコマンドを設定します。コマンドは設定パネルからGUIで選択できます。
- コマンド:cmdEnable
- モーターの動作を許可する(安全装置。一度設定すれば、再起動するまで有効)

- コマンド:cmdRun_rpm
- 速度設定 10rpmで回転

モーターの停止フローも作成します

- コマンド:cmdStop
- モーターの動作を止める(その場で停止・磁力がかかり固まる)
- コマンド:cmdDisable
- モーターへの通電を止める(その場で停止・空転する)
完成したフローは以下になります。

「デプロイ」を押してノードをデプロイ(実行可能にコンパイル)した後「回転開始」「停止」「動作を無効」で動作を確認します。
チュートリアルに使用したフロー
今回のチュートリアルに使用したフローになります。
以下のデータをコピーして、Node-REDエディタの右上メニュー>[読み込み > フローをクリップボードから読み込み]で表示されたウインドウに貼り付けてご使用下さい。